
- 发布日期:2025-03-12 21:57 点击次数:183

《汽车工程》2025年第2期发表了重庆大学高端装备机械传动全国重点实验室等机构联合研究成果"非稳态工况下开关磁阻电驱动系统机电耦合动力学研究"一文。论文综合考虑铁芯磁饱和、转矩波动和构件柔性等因素,建立了适用于非稳态工况的开关磁阻电驱动系统机电耦合动力学模型,并通过实验进行了验证。通过仿真分析,研究了加速、变载荷工况下系统的动态特性,从而为系统的共振规避、易失效构件甄别和优化设计提供理论依据。
一、研究背景
开关磁阻电机(Switched reluctance motor,SRM)具有制造成本低、起动转矩大、不消耗稀土资源等优点,而行星齿轮传动具备结构紧凑、功率密度高等特点,因此综合两者优点的开关磁阻电机-行星齿轮电驱动系统具有广阔的应用前景。开关磁阻电驱动系统经常工作在变速、变负载等非稳态工况,当激励频率跨越系统固有频率时可能引发共振,影响系统的安全性和稳定性;外界载荷突变时,系统的动态特性将产生较大的瞬态改变。但目前国内外学者对开关磁阻电驱动系统的机电耦合动力学研究严重不足,且大多数动力学模型仅适用于稳态工况下的分析。因此,研究非稳态工况下电驱动系统的动态特性,从而揭示系统动态响应机理,具有重要的现实意义。
二、研究内容
1. 开关磁阻电机动力学建模:结合解析法和有限元法建立了适用于不同工况的开关磁阻电机动力学模型,求解了电机输出转矩和径向电磁力,并通过有限元法对径向电磁力进行了验证。
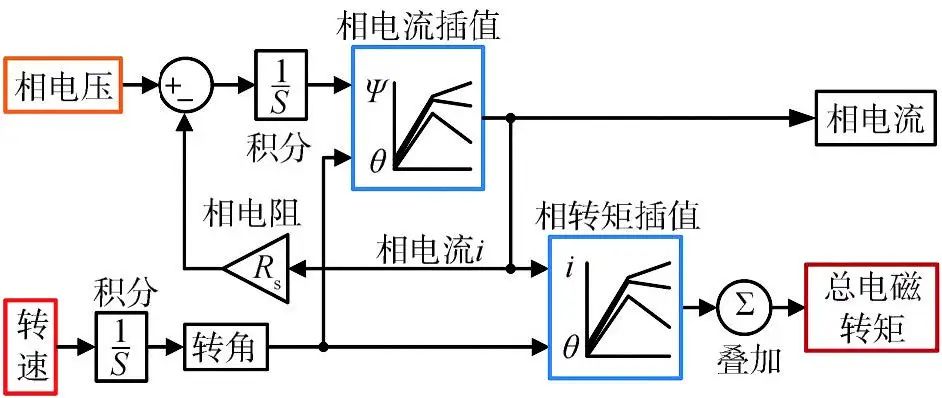
图1 电机电磁转矩计算过程
2. 太阳轮和行星轮集中参数动力学建模:将行星轮系转化为定轴坐标系下的外啮合副和内啮合副,采用切片法求解了啮合力及力矩,并给出了考虑非惯性系影响的太阳轮和行星轮的动力学方程。
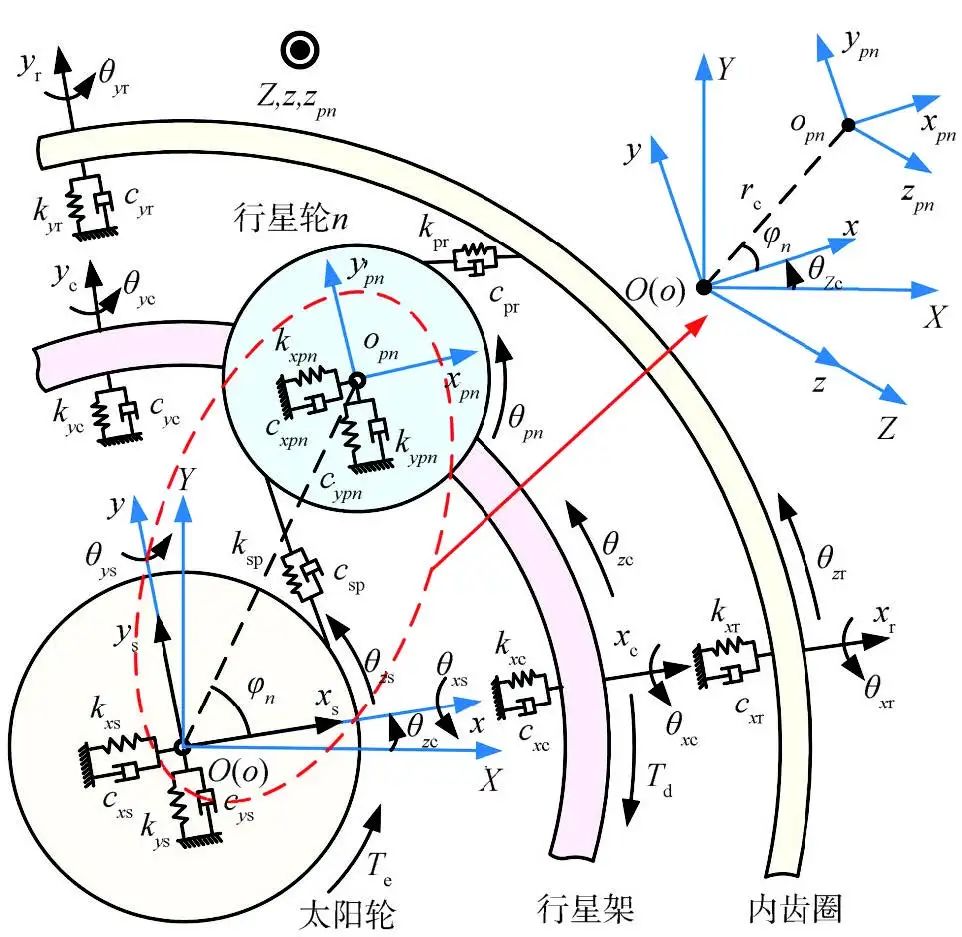
图2 行星齿轮系统动力学模型
3. 电驱动系统柔性构件有限元缩聚模型:根据模态缩聚理论,建立了柔性构件的有限元缩聚模型。

图3 电驱动系统柔性构件及集中节点分布
4. 电驱动系统机电耦合动力学建模及验证:根据电机和齿轮系统动力学模型之间的力、位移和速度耦合关系,建立了开关磁阻电驱动系统机电耦合动力学模型;搭建了电驱动系统实验台架,对模型正确性进行了验证。

图4 开关磁阻电机-行星齿轮电驱动系统示意图
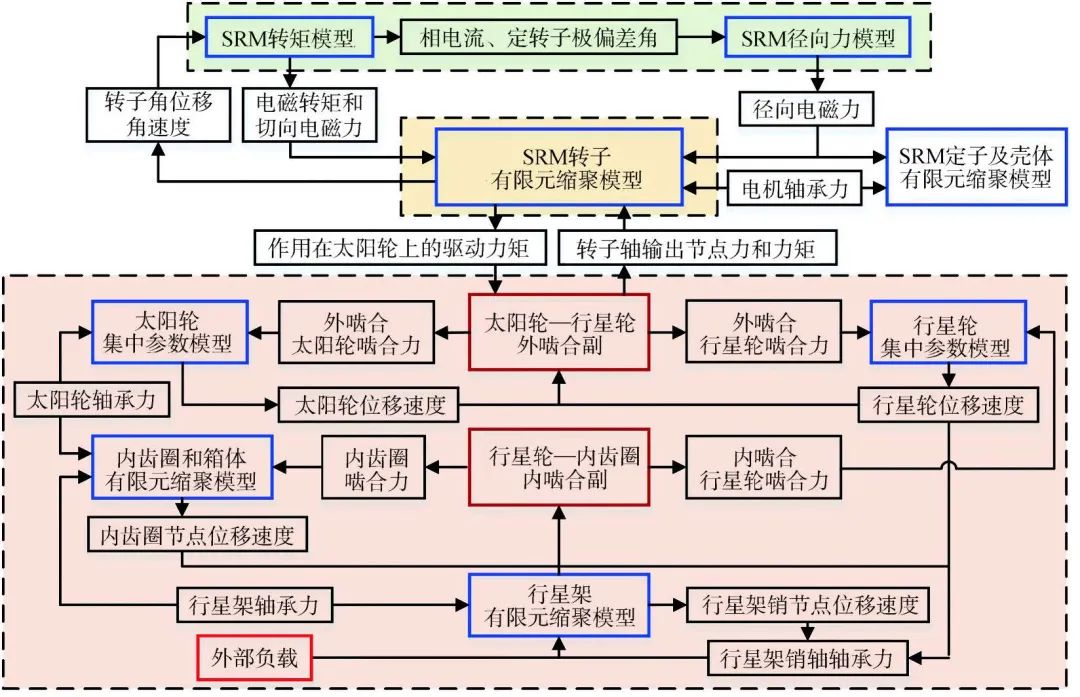
图5 电驱动系统机电耦合动力学建模

图6 开关磁阻电机-行星齿轮电驱动系统实验台架
5、加速工况下系统动态特性研究:仿真分析了加速工况下系统的动态性能,通过升速分析甄别出共振转速,并根据系统振动能量的分布识别出易失效构件及其危险振动方向。
6、变载荷工况下系统动态特性研究:对冲击载荷工况下系统的动态特性进行分析,识别出了系统的强度薄弱环节。
三、研究结果
1. 建立了适用于非稳态工况的开关磁阻电驱动系统机电耦合动力学模型,并开展了实验验证。仿真与实验中相电流的变化趋势相同,相对误差为6.32%,且仿真与实验轴承测点振动加速度的相对误差在10%左右,验证了仿真模型的正确性。

图7 实验与仿真的相电流对比
表1 实验与仿真各测点的振动加速度

2. 计算了不同啮合状态下系统的固有频率,结果表明齿轮啮合时,由于啮合接触线长度的周期性变化,系统的固有频率也在一定范围内周期性改变。
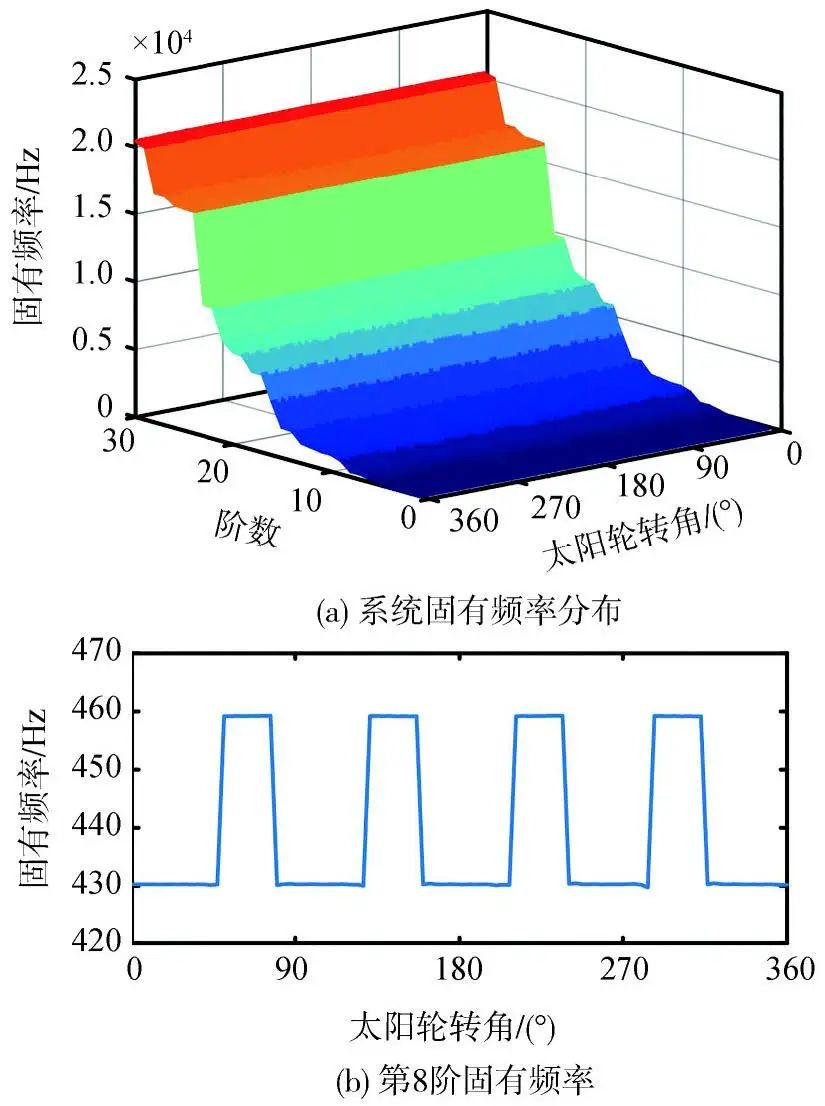
图8 电驱动系统固有频率
3. 分析了加速工况下系统的共振特性,系统最易发生共振的转速为3900r/min,此时多个激励频率跨越系统固有频率,其中以齿轮啮频激发第15阶固有频率产生的振动能量最大,振动能量主要集中在行星架的θy方向上。
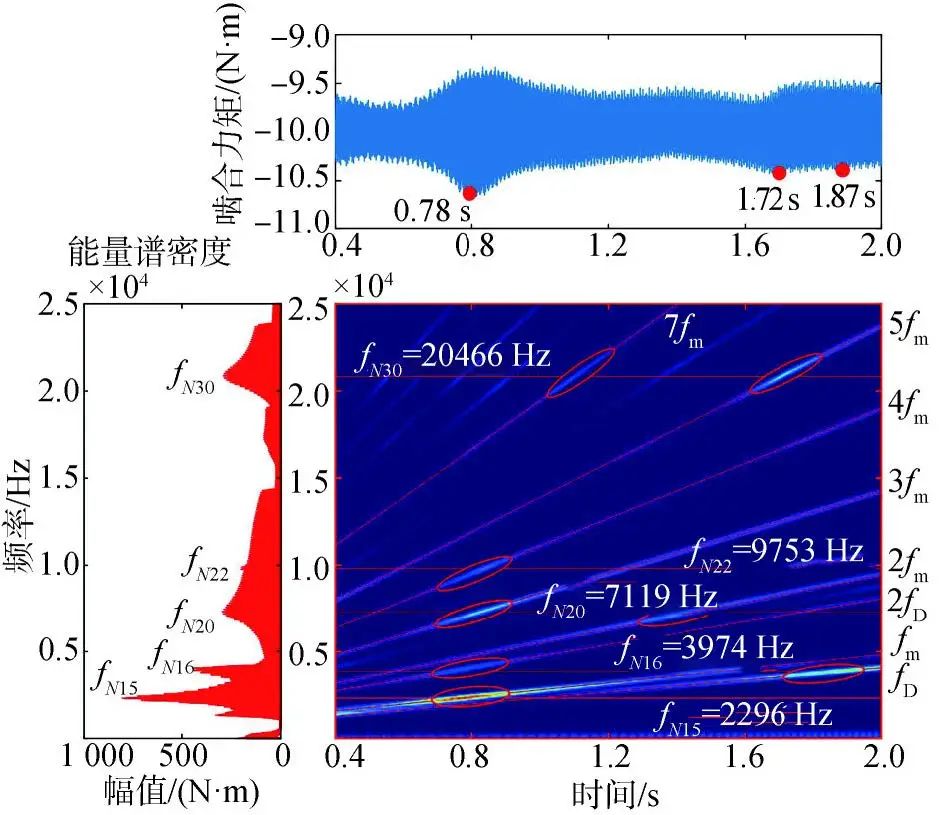
图9 加速工况下第一对外啮合副动态啮合力矩
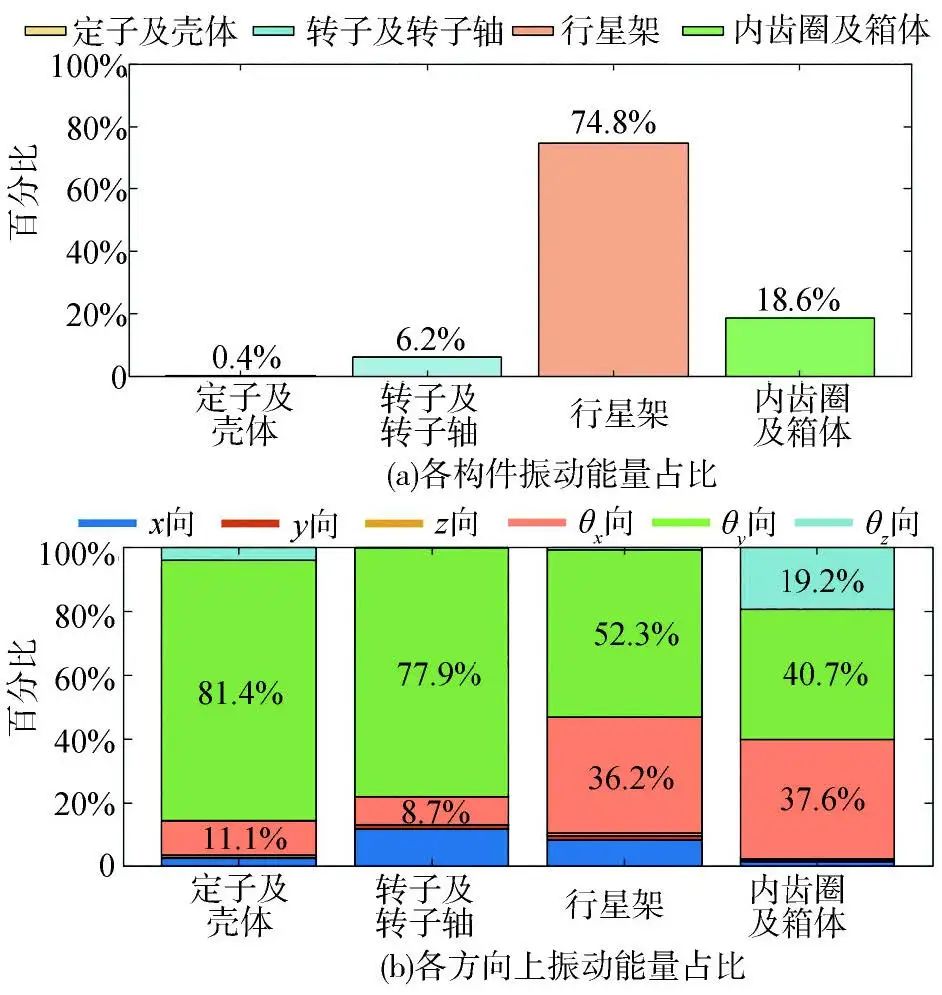
图10 第15阶固有频率下振动能量分布
4. 研究了变载荷工况下系统的动态特性,系统在载荷突变的瞬间产生了以第5阶固有频率为主的低阶自由振动,振动能量主要集中在内齿圈及齿轮箱体的θx和θy方向上,可以通过适当增加箱体壁厚的方式来减小系统的瞬态振动。
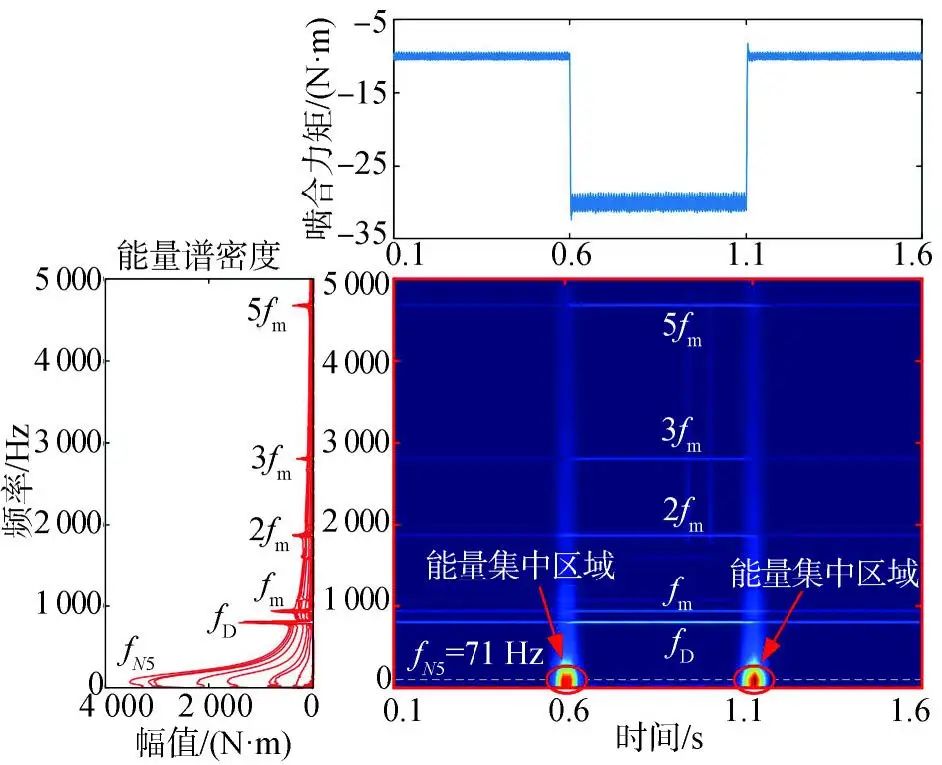
图11 变载荷工况下第一对外啮合副动态啮合力矩

图12 内齿圈第一个轮齿扭转方向上振动角位移
四、创新点与意义
论文将铁芯磁饱和(有限元分析)、转矩波动(解析法)及构件柔性(模态缩聚)综合集成到开关磁阻电驱动系统的机电耦合动力学模型中,填补了非稳态工况下多因素协同作用研究的不足。提出基于广义坐标(平移位移+角位移)的非惯性系行星齿轮模型,结合切片法求解啮合力矩股票玩杠杆股票放杠杆,实现了复杂传动系统的精确动力学仿真。搭建了包含转速转矩传感器、振动加速度传感器的实验平台,通过对比相电流、轴承振动加速度等关键参数,验证了模型的准确性。提出的共振规避策略和结构改进方案可直接应用于电动汽车、轨道交通等领域的电驱动系统设计,从而提升系统的可靠性与寿命,具有重要的理论意义和工程应用价值。
- 实盘配资盘 特朗普,否认!事关哈佛大学2025-06-14
- 炒股杠杆口诀 特朗普一纸禁令,全球高校疯狂"抢人":哈佛学生成香饽饽_美国_签证_国际2025-06-13
- 股票杠杆在哪里 1-4月中国发行地方政府债券合计35354亿元2025-06-12
- 什么是股票杠杆 5月28日盛泰转债上涨0.58%,转股溢价率63.12%2025-06-11
- 股票高手的炒股实例 国债期货收盘,30年期主力合约跌0.26%2025-06-10
- 股票配资炒股公司 股票行情快报:新农股份(002942)5月27日主力资金净卖出70.21万元2025-06-09
杠杆金融公司_股票杠杆交易_外汇交易杠杆
热点资讯
- 炒股配资配资线上 患有卵巢早衰女性适不适合做试管婴儿?
- 高端的正规配资平台 空腹吃一个柚子,血糖稳了!糖尿病患者不可不知的秘密!
- 股票交易平台 女人如果想恋爱,一定要抓住机会,因为过了年龄,身边桃花就没了
- 2023正规炒股配资 鲨鱼菲特:轻食小贴士,轻松保存与快速准备
- 炒股杠杆最高几倍 2024年12月13日全国主要批发市场黄金瓜价格行情
- 专业股票配资机构 春节档破50亿 《哪吒2》或将登顶影史票房榜!600余账号因引战互撕被禁言
- 配资APP排名 证监会:支持优秀民营供热企业发行REITs
- 股票里面的杠杆 《无水之池》:艺术迷途,人性深渊的扭曲探索
- 建行黄金杠杆 无花果怎么吃比较好?可以和蘑菇一起炒吗?
- 股票十倍杠杆原理 Vala:以移动空间重新定义汽车,开启生活方式新纪元